リンク
ENGLISH
芝浦工業大学
機械機能工学科
機械機能工学科Webサイト
知能材料学研究室
(前田研究室)
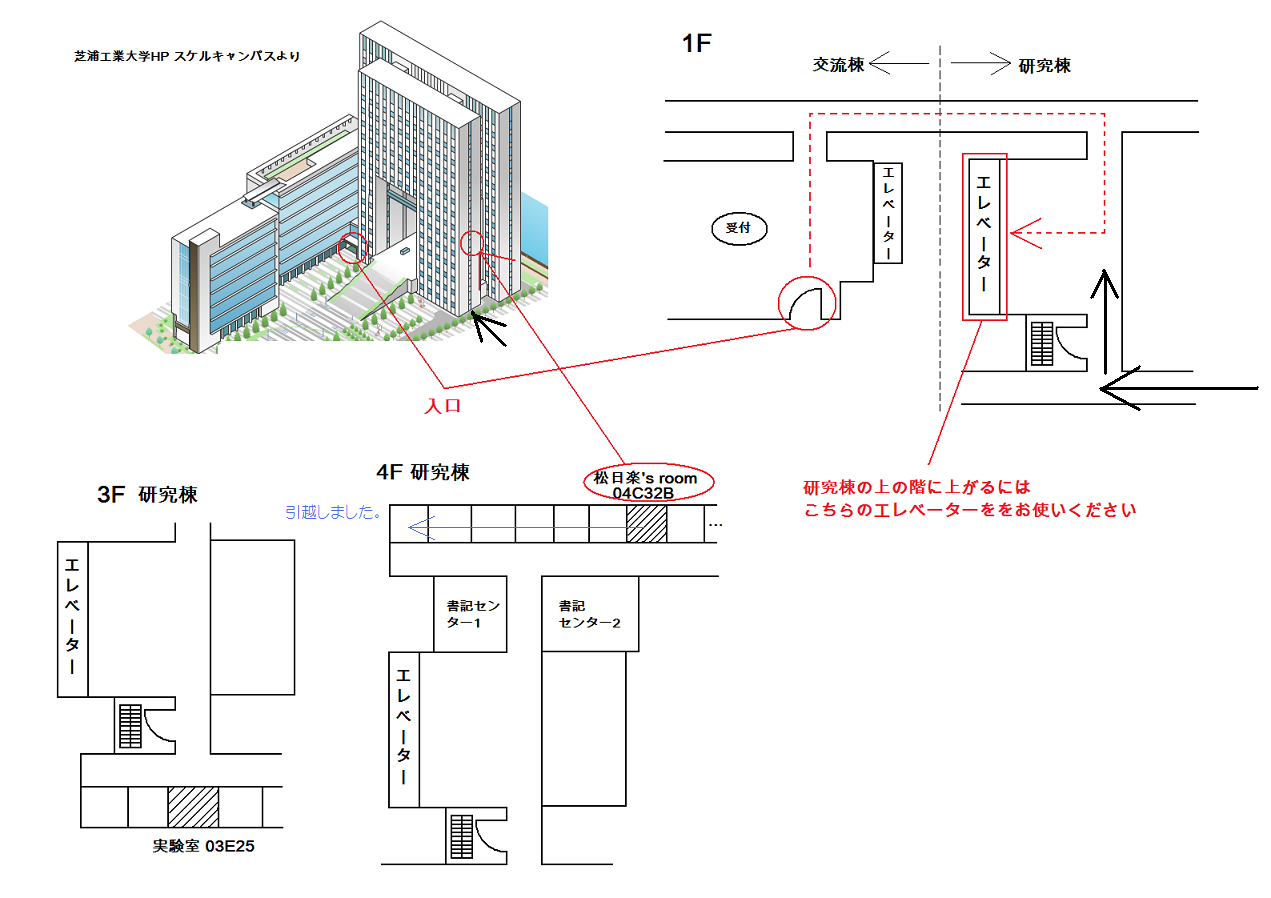
アクセス
豊洲キャンパス
研究室
RTミドルウエアを活用したロボット技術の研究
RTミドルウエアコンテスト2014(SI2014)公開版
「RTMによるカメラマンロボットの動作確実性の向上」
以下、ダウンロードできますが、研究用途で、かつ利用者の責任のもと
ご利用下さい。
修正BSDライセンスです
。
・・概要スライド
「RTMによるカメラマンロボットの動作確実性の向上_概要スライド」
・・ユーザマニュアル
「RTMによるカメラマンロボットの動作確実性の向上_スタートアップマニュアル」
・・実行ファイル(Windows版OpenRTM-aist1.1向け)とソースコード
動作確実性を向上させるRTC
「result_check」
「Multi_Result_Management」
「FaceDetection」
「UpBodyDetection」
「SkinDetection」
「LRFSegmentation」
上記RTCが全部入ったファイル
使いやすいRTCになるように随時改良していきたいと思います
ご意見ご指摘がありましたらプロジェクトページのコメント欄にお願いいたします
OpenRTM-aistのプロジェクトページ
<更新履歴>
2014/10/31・・・本ページにて関連情報を新規アップロード
関連情報リンク


{kind=link}